






发布需求
一键发布材料需求,依托强大算法与海量数据,精准对接适配资源。
随着对更安静车辆需求的不断增长,在车舱内部的声学改进上面临了新的重大挑战。传统动力系统声音掩蔽效应的缺失,使得乘客暴露在各种新的噪音中。尤其是随着电动汽车的出现,防止吱嘎和咔嗒 (Squeak & Rattle,简称 S&R) 噪音问题成为一项基本要求。
S&R与通常导致客户投诉的产品“听觉感知”质量有关。先前的研究表明,S&R是继动力系统和电气问题之后汽车购买者中报告的第三大问题。导致这些现象的潜在物理机制主要与两个或多个元素之间的相对运动有关。而结构缺陷、糟糕的几何设计和/或不兼容的材料对经常被发现是根本原因。
图1:S&R是汽车购买者中报告的第三大问题(图片来源于网络)
为此,大多数汽车制造商已经开发了内部方法和程序来评估S&R,其中,采用客观方法来评估S&R显得尤为重要。任何声场都可以通过声压和质点速度的空间变化来描述。三维 (3D) 声强测量能够捕获所有可用的声学信息,为解决复杂问题提供了独特的起点。此外,通过评估声音传播(有功声强)的净方向以及相邻组件之间的近场相互作用(无功声强),3D声强矢量场的成像可以用来表征振动声学噪声源。
我们知道,PU探头可以直接测量声压和质点速度,它在现场测试、故障诊断和声源定位方面有着出色的表现,下面的视频1为Scan & Paint 3D的测试示例。那么,我们是否可以基于PU来进行声强的3D扫描测量,并以此来研究S&R问题呢?本文将会以汽车座椅为例,在这方面做出相应的探索。
02.声强
声强是声场中声能流动的测量指标。它不仅提供声音辐射的量化,而且提供声音传播的方向。瞬时声强定义为声压与质点速度的乘积。
声压和质点速度具有幅值和相位的差异,这主要取决于声源的特性、测量距离和频率。在实践中,通常根据随时间平均的复声强的有功或传播部分来研究稳态声场,即
I = [Ix, Iy, Iz] = <pu>t = Re{p u*}
< · >t表示时间平均。该量的虚部称为无功声强
图2显示了3D有功声强矢量和一维 (1D) 复数声强的示意图,其中θp-θun表示声压和粒子速度分量之间的相位差。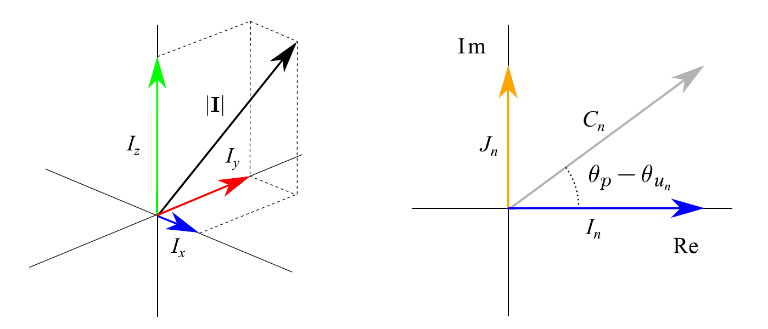
图2:3D有功声强矢量(左)和1D复声强(右)的示意图
在实际测试中,由于PU探头可以同时测量声压和质点速度,因此可以直接计算 3D 声强,无需任何近似值。该物理量提供有关声能流动的方向信息,同时可以通过取有功声强矢量的模数来提取标量项。
已经有大量研究发表,探索了多种声强测量原理和传感器之间的根本区别。当压力强度指数较高时,不能使用基于压力的测量方法,这在实践中通常会限制 p-p声强探头在具有高背景噪声或反射的环境中的使用。
相比之下,使用PU探头进行强度计算的误差主要取决于声场的能量传播和探头的校准精度。如果无功声强很高,例如在源的近场中,传感器校准中的小相位不匹配可能会导致声强估计出现相当大的误差。尽管在高的无功声场中有功声强可能会有所偏差,但仍可以准确测量压力和质点速度之间的相位差。因此,在具有高的无功声强的位置,仍然确保可以评估到最可靠的数据。
03.测试方法:Scan & Paint 3D
在本次实验中,我们采用的测试系统是Scan & Paint 3D。在测量声场之前,需要有测试对象的3D模型。该模型用作视觉参考以及自动将3D跟踪器定位到测量环境中。关于声学数据采集的过程,首先是手动移动3D声强探头,同时使用立体相机提取传感器在3D空间中的瞬时位置。
采集到的信号被分成多个片段,并使用空间离散化算法分配到它们相应的位置。空间分辨率是在后处理阶段定义的,因此可以根据可用的数据进行调整。最大可行分辨率由3D跟踪器的精度决定,在这个案例中可低至3毫米。 然后可以用质点速度或声强矢量的表示方式来计算声场中声音的变化情况,以提供声音分布的视觉效果。图3展示了主要的测试硬件和分析软件。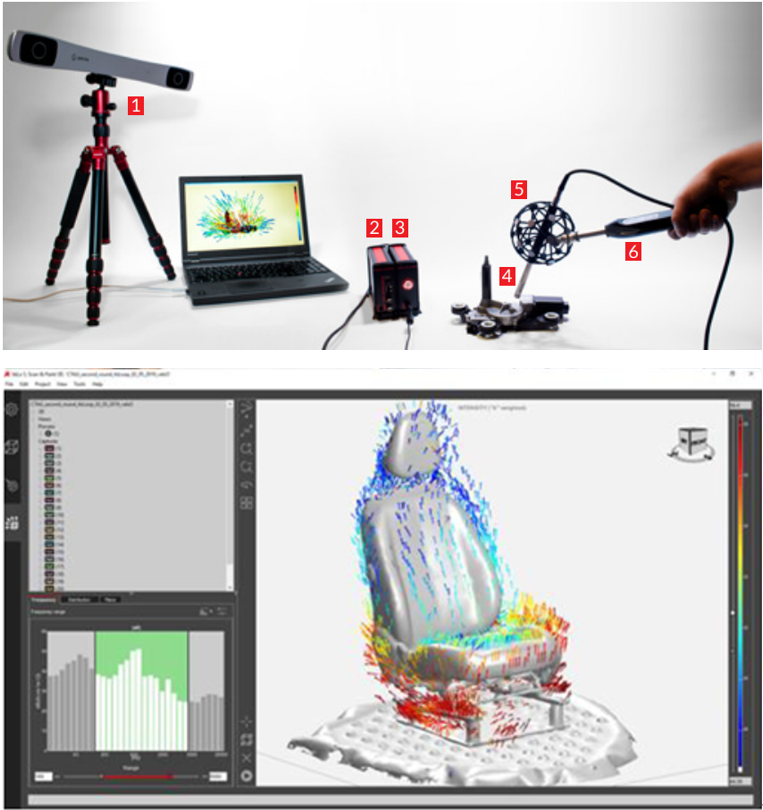
图3:Scan & Paint 3D硬件(顶部)和分析软件(底部)
04.测试设置及扫描
待测座椅的设置
本次待测对象为一款商用车的汽车座椅,它被安装在半消声室内的振动器上。振动信号来源于汽车在崎岖的鹅卵石路面上行驶时,通过座椅底部的多个加速度计记录到的振动信号。整个信号的持续长度为120 s(为保持测试状态的相对平稳,在实际测试时,仅截取其中的4s信号进行循环播放。在测试前,针对输入4s循环和120s信号所产生的S&R噪声,我们组织了主观评价,评价结果表明,采用4s循环和120s评估得出的声源位置是一致的,得分也非常接近),且激励在所有六个自由度 (DOF) 中都具有显著的能量。
扫描测试
在汽车座椅周围进行多次测量,以实现高空间分辨率的声音成像。这次用Scan & Paint 3D进行了22组的扫描测试,大约花了45分钟的时间。跟踪摄像机设置在两个位置,以捕获座椅的完整视图。图4显示了扫描结构的预览,其中扫描轨迹以不同的颜色给突出显示出来。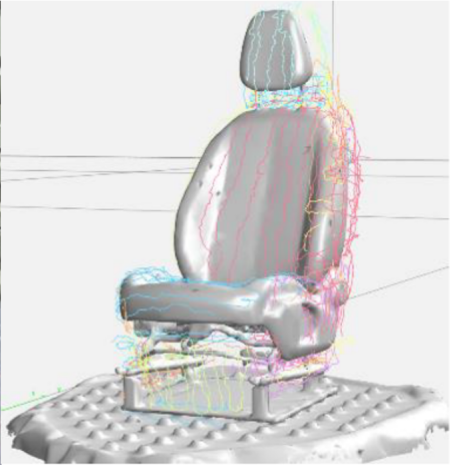
图4:带有22条扫描轨迹的预览图
05.3D声强可视化
扫描完成后,得到的数据包含了座椅周围的声压、质点速度和(有功和无功)声强的空间分布等信息。在这里我们仅分析了一些主要发现,但需要注意的是,如果有需要,我们还可以围绕任何特定区域或任何感兴趣的频段进行更深入的分析。
图5显示了宽带的3D声强成像(20 Hz 至 10kHz)以及空间平均功率谱。矢量场表明座椅底部和振动板是低频和中频的主要噪声源,这与用于驱动振动器的激励信号的频率范围一致。
考虑到这个结果结合了由于S&R引起的座椅辐射的声音以及振动器产生的背景噪音。因此,在对每个噪声源进行详细分析时,需要选择适当的频率限制。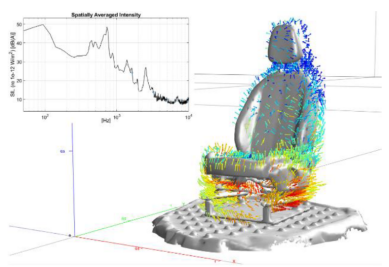
图5:动态范围为20 dB的整体声强成像(20 Hz 至10 kHz)
我们在进行3D成像计算的时候,考虑测量值的统计分布是过滤和避免不相关数据的关键。当在短时间内的变化很高时,这个滤波过程对于S&R问题特别有用。声强级直方图用于通过设置幅值限制来约束数据。图6显示了使用和不使用直方图过滤的结果。如图6所示,当包含最低级别的50%数据被隐藏时,主要问题区域的位置会变得清晰起来。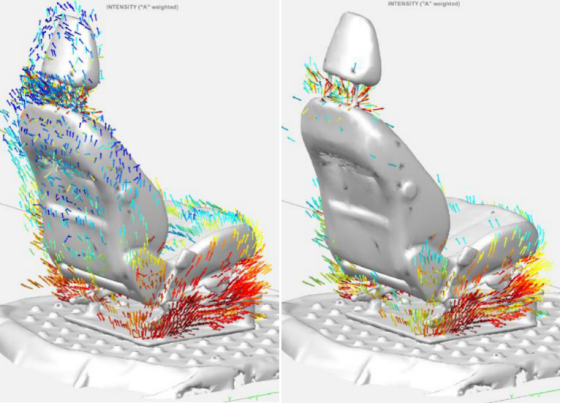
图6:所有数据的高频声强成像(800 Hz至10 kHz)(左)和隐藏50%低幅值数据的成像图(右),动态范围为15 dB
此外,图7显示了感兴趣的主要元素附近的空间平均声音强度谱。初步分析表明,除了振动板之外,头枕和座椅滑块是主要的噪音来源。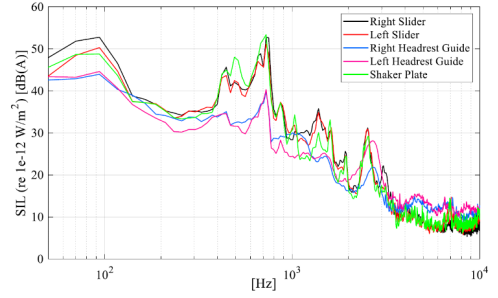
图7:感兴趣的主要元素附近的空间平均声强,突出每个频带的激励 下面各个小节是关于主要噪声源的进一步描述。
头枕
头枕区域是其中一个主要的噪声源位置。因此,需要对这个位置进行进一步的分析。这时,我们可以用空间过滤器来排除控制位置之外的所有数据。图8为同一个部位的两个不同频率范围的显示结果。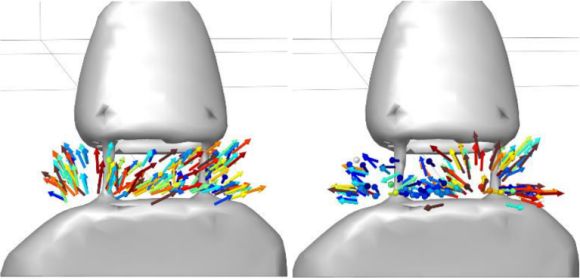
图8:头枕区域内两个频率范围的声音分布:800 Hz至2 kHz(左)和2kHz至10 kHz(右),动态范围为12 dB
从成像的结果来看,头枕导杆和导轨之间的连接是S&R的主要来源之一,这个和主观评价的结果是一致的。此外,可以得出结论,在800Hz和2 kHz之间的范围内,头枕的右导轨是主要的噪声源,而在2kHz以上,左导轨是主要的噪声源。这里的 “左”和“右”与坐在汽车座椅上的人使用的相反。
虽然相邻箭头之间的电平波动在某种程度上很大,但传播方向保持一致,并在空间上平滑变化。因此,产生声场的主要声源的位置可以通过沿着与传播方向相反的箭头,向原点收敛来估计得到。
座椅滑块
图6中确定的其他有问题的元件是座椅连接结构和车辆地板(在本例中为振动板)框架上的座椅滑块。图9显示了上一小节中相同频率范围内(800 Hz至2 kHz和2 kHz至10 kHz)两侧的比较。如图所示,在两侧沿滑块框架处有明显的声音辐射。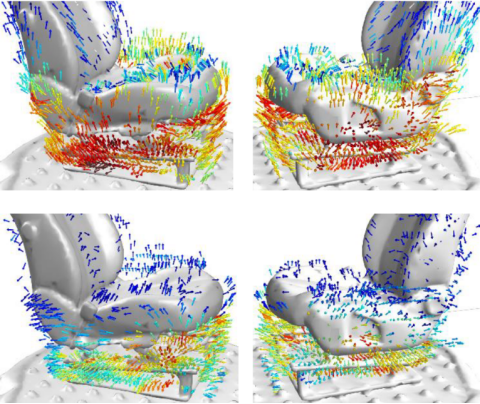
图9:左右滑块在两个频率范围内的声音分布:800 Hz至2 kHz(底部)和2kHz至10 kHz(顶部),动态范围为15 dB
在三维空间中,由于箭头的密度很高,有时候不容易看清实际的声源位置,因此我们还可以采用切片的方式来表示。如图10所示,它显示了约束到以座椅滑块和头枕导向装置为中心的2D切片进一步的声音可视化结果。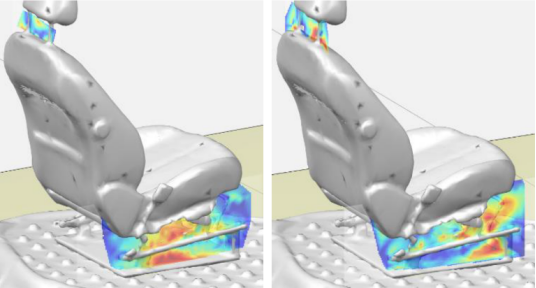
图10:两个频率范围的声强切片:800 Hz至2 kHz(左)和2kHz至10 kHz(右),动态范围为15 dB
很明显,座椅滑轨的后部可能在800 Hz至2 kHz频带内产生S&R噪声,而滑轨的前部产生2 kHz至10 kHz之间的大部分声激励。 有功和无功声强 上面所有结果都集中于分析声强的有功部分,即从声源向远场传播的声能。然而,通过评估无功声强也可以获得重要信息。在包含耦合机械部件的振动声学问题中,无功声强主要与不能有效辐射声音的结构激励有关。
然而,当安装条件改变或附加部件连接到受激结构上时,结构振动会导致噪声问题。 图11显示了20 Hz和375 Hz之间的有功和无功的声强结果。从图中可以看出,激发源根据可视化的数量而不同。座椅底部是主要的噪声辐射部件,而靠背和头枕则是无功声强最高的部件。
对此,我们发现,高位移并不一定意味着声音辐射,如靠背和头枕,它们具有高的幅值,然而并没有向外传播声能。取而代之的是,这部分能量被“储存”起来,犹如被压缩的弹簧;当遇到合适条件的时候,这些被“储存”的能量才会被释放出来,从而向外传播声能。 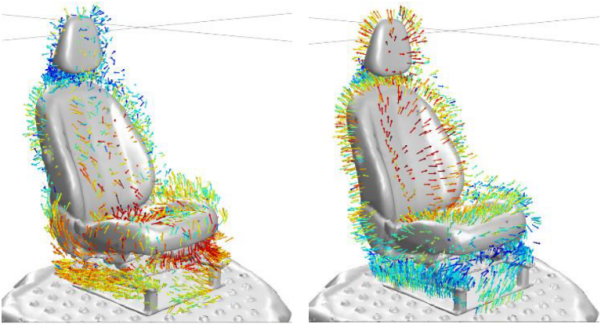
图11:20Hz到375Hz之间有功(左)和无功声强(右)的分布图,动态范围为15dB
06.小结
在本次实验中,我们介绍了一种新的进行S&R测试的测量方法。我们发现,使用Scan & Paint 3D系统进行的扫描3D测量能够有效定位导致噪声辐射的主要部件(滑块和头枕导轨)。同时,提供了几个3D声强矢量图和2D切片的示例,它们可以实现3D声场的可视化并可评估噪声源的位置。如图所示,三维空间中声音强度的可视化能够直观全面地了解声音的辐射机制以及问题元素之间的相互作用。

 塑库专家服务
塑库专家服务
 新品选材
3000+ 合作案例
缺陷解决
专业团队1V1跟进
新品选材
3000+ 合作案例
缺陷解决
专业团队1V1跟进
 热门文章
热门文章






















