






发布需求
一键发布材料需求,依托强大算法与海量数据,精准对接适配资源。
今年5月,特斯拉做出了一个重大决定:北美市场上的Model 3和Model Y将不再配备雷达传感器,仅保留摄像头作为自驾系统的传感器。然而,急着“尝鲜”的北美车主就体会了转弯失灵的滋味。
要知道在“激光雷达”这个问题上,马斯克是坚定的反对派,他本人曾多次公开炮轰:“昂贵的雷达方案是极其愚蠢的,任何使用激光雷达方案最后都将失败。”
然而,偏偏有人和特斯拉唱反调:早在今年4月份,华为极狐阿尔法S就展示了流畅全程12km零干预自动驾驶:
3个激光雷达+6个毫米波雷达+13个摄像头+12个超声波雷达。
如此硬核的雷达配置,宣告着以华为为首的国产新势力对于自主拥有的激光雷达技术的自信。
在刚刚闭幕的世界人工智能大会上,华为智能驾驶总裁苏箐用“杀人”一词怒斥特斯拉车祸。
激光雷达 VS 摄像头,谁才是未来自动驾驶主流?
作为安全系数要求最高的路况感应系统,在自动驾驶这颗科技树上,已经形成了两个泾渭分明的分支路线,这背后的深层技术逻辑是什么?
01激光雷达:我到底该听谁的?
说到自动驾驶,它本质其实是人工智能一个分支,归根结底是在模仿人的行为。它主要核心有三个环节:感知、决策、执行。
比如我们开车时,眼睛遇见红灯(感知),视觉神经传递给了大脑,大脑下指令(决策)让自己用脚踩下了刹车(执行)。自动驾驶也需要这样一套系统,其中用来模拟人眼的就是“传感器”,对后续的决策和执行起着决定性作用。
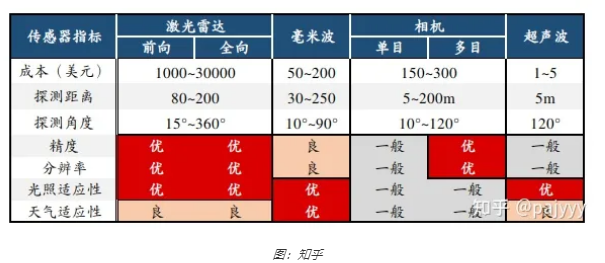
现在自动驾驶有一般有四大传感器,分别是摄像头,激光雷达,毫米雷达,超声波雷达。前二者凭借优良的精度成为最为核心配置,与其它传感器互补短板,形成系统的感知优势。
然而,“雷达+摄像头”的融合识别系统除了较高的成本,还有一个致命的问题:不同传感器有不同的机理和判断,会有不同的识别结果,当发生冲突的时候到底听谁的?之前特斯拉自动驾驶场景中出现的“幽灵刹车”就在于行驶过程中,发生了“摄像头告诉你前面没问题可以走,而雷达却说不行有障碍物……”的情况,系统发生了误判。

02纯视觉识别:我爱背单词
既然这种矛盾的信息会给系统的抉择带来麻烦,老马想:与其这样纠结,干脆我只留下摄像头,把视觉做到极致。
特斯拉坚定认为,传感器只需采用“摄像头”就足够了,就像一个视力良好,反应敏捷的老司机,很可能一辈子都不出事故。只要不断提高车载视觉系统和行车逻辑的稳定性,完全可以达成安全的自动驾驶。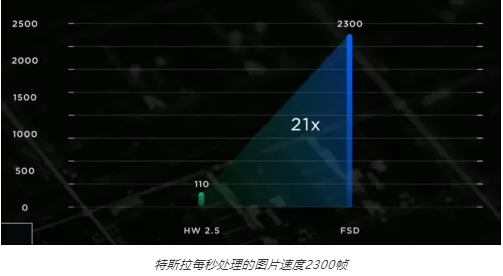
但!是!
摄像头识别有个前提,那就是要提前“认识”所见的信息,就和记单词一样,需要大量的数据输入进行“学习”,然而实际世界很多东西都是无法穷尽的,不能保证摄像头每个收入的物件它都认识。如果系统从没有学习过,麻烦就大了:比如路上横着一块白色的广告牌,因为没见识过,摄像头会误以为这是白云,给错误信息而继续行驶下去。否则会发生文章开头发生一幕。、
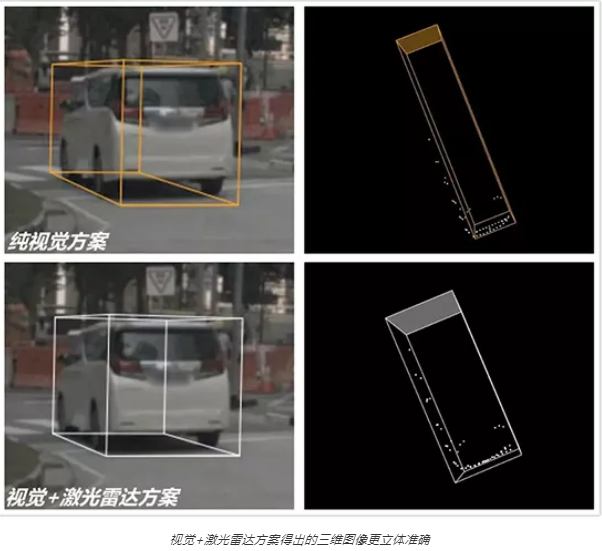
03激光雷达VS纯视觉 谁更准?
其实将两种方案横向对比时,很容易就能发现:目前技术条件下,采用激光雷达的感知方案所探测的范围更广、精度更高。
这是因为激光雷达可以通过发射激光,主动去探测周围环境,而且与毫米波雷达相比,激光雷达发射的激光(电磁波)呈线性,穿透性也更强。所以,即使在夜间、强光等特殊场景下,激光雷达也能准确地检测到障碍物,并进一步生成三维位置模型,实现数据的精确获取。
同时,国内以华为为代表的造车新势力们在针对激光雷达“高成本”和“易干扰”两大疼点也做了相应优化:
1.高成本:
引爆上海车展的极狐阿尔法S的3个激光雷达皆是华为自主设计制造的96线激光雷达,整套的价格只需不到200美金,要知道特斯拉三目摄像头的成本就得300美金。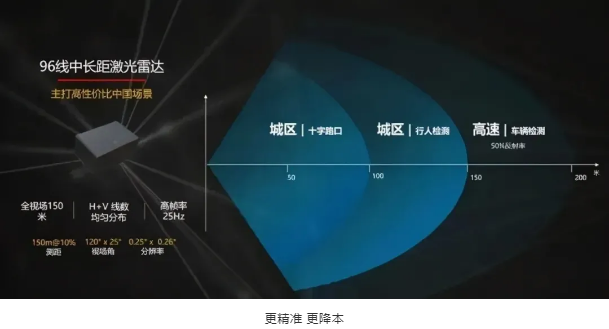
2.易干扰:
所有干扰,都是把信号给错了对象。目前不少激光雷达采用“两个反射面”的设计,可以有效避免发射激光束和接收反射激光束互相干扰。此外在上游的材料端,不少国内知名材料大厂,已经研发出全新的电磁屏蔽材料,在选材源头上隔断电磁骚扰!
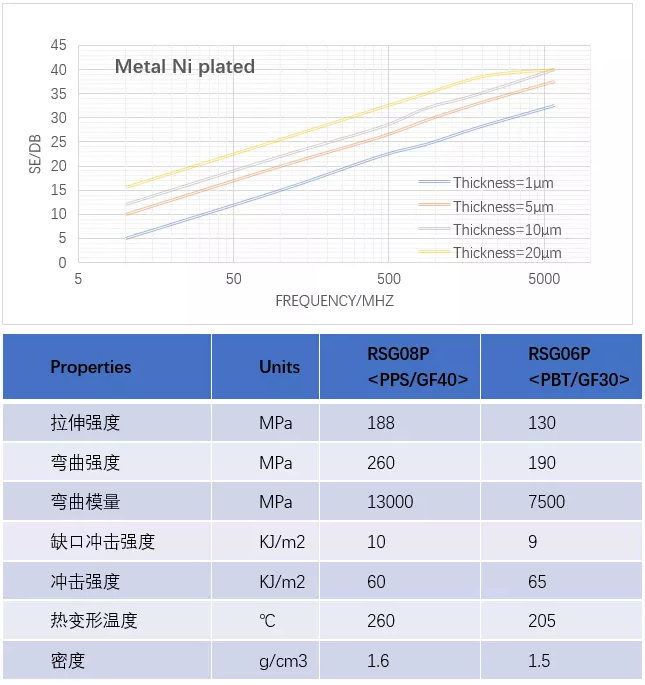
作为改性塑料的代表品牌,小编所在的锦湖日丽,也早早洞察到了激光雷达无限潜力,提前研发布局,与国内造车新势力一起推动行业进步。针对电磁屏蔽功能,锦湖日丽推出了两类方案:金属电镀方案和导电屏蔽方案,金属电镀方案的屏蔽效果和物性如下,可以看出,该材料的屏蔽效果和金属相同,同时兼顾高度可设计性和成型加工性的优点。
至于导电屏蔽方案则可以避免电镀加工的工序,直接一步成型。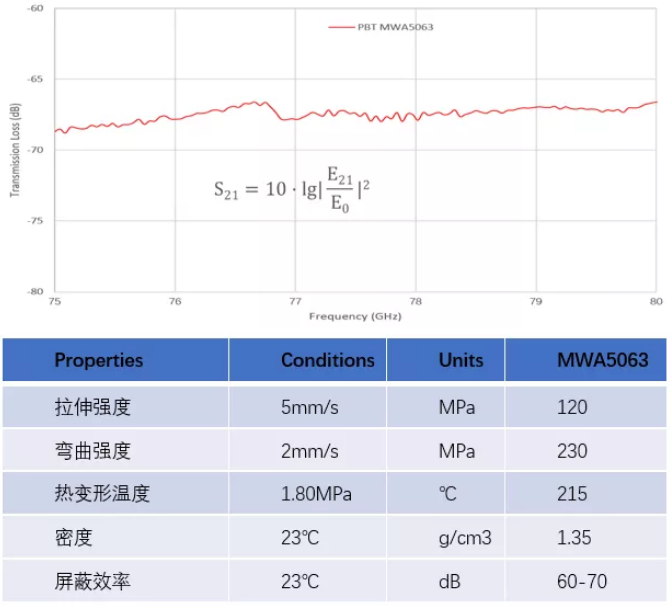
TIPS:
屏蔽材料反射回来的电磁波会对内部电子器件的正常工作产生干扰。为降低干扰对内部电子期间的影响,建议搭配吸波材料一起应用。吸波材料可以将材料表面的电磁波吸收,转化为热能,有效避免电磁波反射产生二次污染,提高设备工作的稳定性。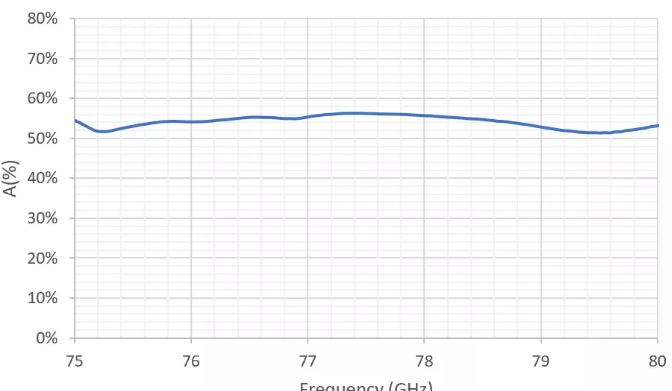

 塑库专家服务
塑库专家服务
 新品选材
3000+ 合作案例
缺陷解决
专业团队1V1跟进
新品选材
3000+ 合作案例
缺陷解决
专业团队1V1跟进
 热门文章
热门文章






















